Research Overview
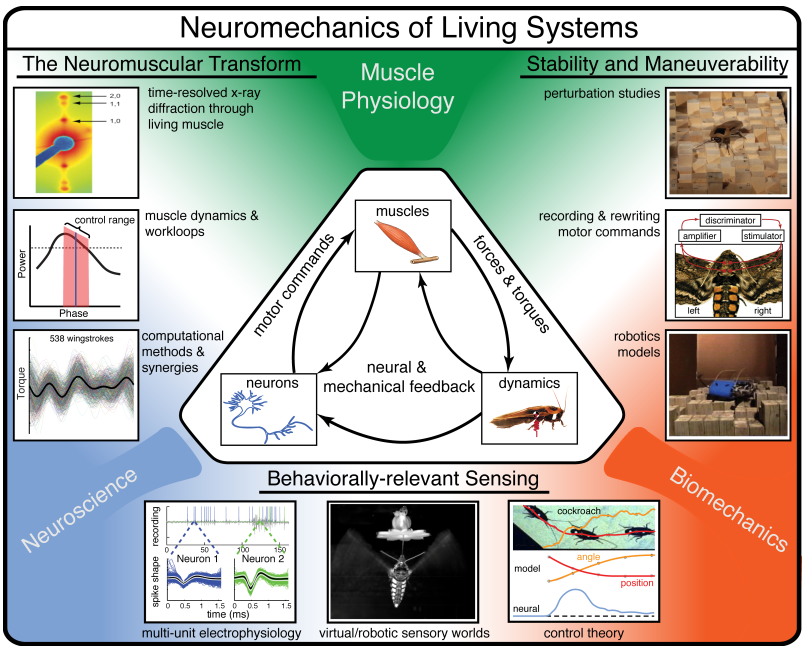
A central challenge for many organisms is the generation of stable, versatile locomotion through irregular, complex environments. Animals have evolved to negotiate almost every environment on this planet. To do this, animals' nervous systems acquire, process and act upon information. Yet their brains must operate through the mechanics of the body’s sensors and actuators to both perceive and act upon the environment. Our research investigates how physics and physiology enable locomoting animals to achieve the remarkable stability and maneuverability we see in biological systems. Conceptually, this demands combining neuroscience, muscle physiology, and biomechanics with an eye towards revealing mechanism and principle -- an integrative science of biological movement. This emerging field, termed neuromechanics, does for biology what mechatronics, the integration of electrical and mechanical system design, has done for engineering. Namely, it provides a mechanistic context for the electrical (neuro-) and physical (mechanical) determinants of movement in organisms. We explore how animals fly and run stably even in the face of repeated perturbations, how the multifuncationality of muscles arises from their physiological properties, and how the tiny brains of insects organize and execute movement.
[pt_view id="b4db4c65d6"]