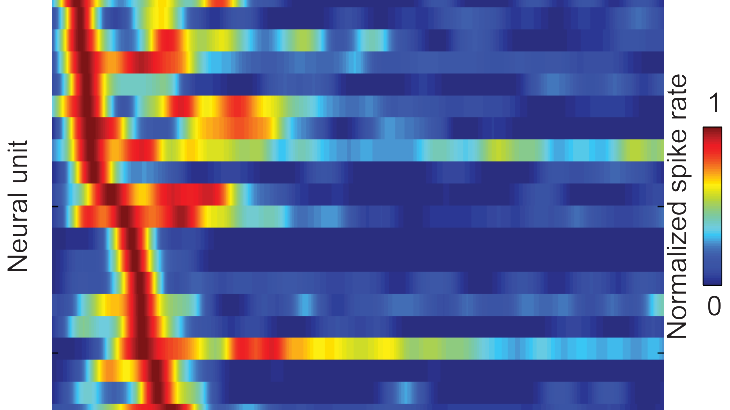
In an earlier research project with Dr. Jean-Michel Mongeau (now professor at PSU) we looked at the how cockroaches use their antennae as to feel surface in front of them and navigate in low light. Our approach in that project was to find the simplest control law the cockroaches could be using to maneuver by touch. This is part of our general approach to use feedback control and dynamic systems techniques to figure out how the brains and bodies of animals work together to produce stable and maneuverable movement. Cockroaches like to run along walls and other vertical surfaces. We discovered that to follow turns in the wall the cockroach has to detect not only how far away from the wall it is, but also how fast it is approaching the wall (a proportional, derivative control) and that these two pieces of information are present when we record from the whole population of neurons in the antenna of the cockroach. However the response in the antenna was highly filtered -- when the antenna moves against a wall for only 40 ms the neurons are active for ~300 ms, long enough to act as a simple control input for the motor system. This inspired a new neurophysiological hypothesis about how the antenna works. Either each individual mechano-sensor in the antenna could do sophisticated process and filter the tactile signal or the information could emerge at the population level. Instead of letting the cockroach run along a variable we restrained the cockroach so that we could record from its antennal neurons and moved a wall segment (made from subwoofer) to actuate the antenna. We record from many individual neural units in the cockroach's antenna and found that each individual neural response encodes the velocity of the wall's movement. However the temporal filtering that occurs is not present in each neuron. Instead each response was over fairly quickly (~40-50 ms) but occurred at different times (latencies) after the stimulus. The result is that if you summed the response of all the neurons, we could recreate a signal that had both the velocity encoding and the correct timescale to act as a control input. This work is a good example of figuring out first how animal has to control its body to perform agile locomotion and then second using this knowledge to make predictions about how the nervous system processes information. In this case it appears that most of the processing necessary for the cockroach to wall-follow is accomplished in the peripheral encoding on sensory stimuli.