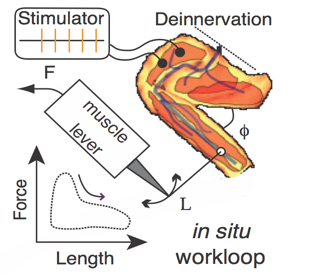
In the previous project we altered the commands the cockroach's brain was sending to its muscle in real-time while the animal was running or maintaining its posture. We found that the same muscle could have three different function even when activated by the same commands. These differences seemed to arise for the mechanical context in which the signals were active. The standard way to test these muscle function is a workloop -- taking the muscle out and stretching through a cyclical length change and measure force while activating it at certain points within the cycle. Together with Tom Libby from Berkeley’s Center for Integrative Biomechanics in Education and Research (CiBER), we developed a new technique for performing workloops in an intact limb. We de-innervate the limb by cut the motor neurons going to the muscles and then re-activate the muscle using extracellular electrodes. We then actuate the joint directly and measure the work done at the joint.
What did we discover about how this cockroach muscle changes function? Under static conditions when the animal is standing still, the muscle operated primarily as a linear actuator. When the muscle is undergoing cyclic contracts, like during running, increasing activation to the muscle caused the muscle to be non-linearly recruited from acting like a brake (absorbing mechanical energy) to acting like a motor (producing mechanical energy). This unpredicted muscle response arose from two positive mechanical feedback loops in the muscle physiology itself. During running, increase neural activation above a specific threshold causes the positive mechanical feedback mechanisms would kick in and enables the muscle to do positive work (accelerate the body). The timing of when this positive work occurs during cockroach's step can change depending on when the commands first start to arrive to the muscle. This shift cause the muscle to switch from accelerating the animal vertically to producing a turn.