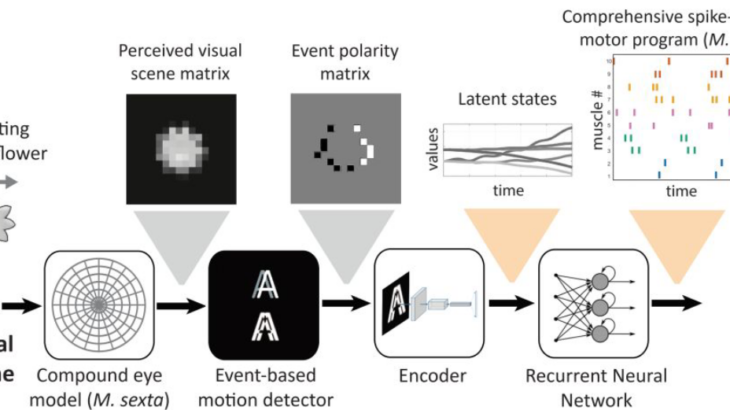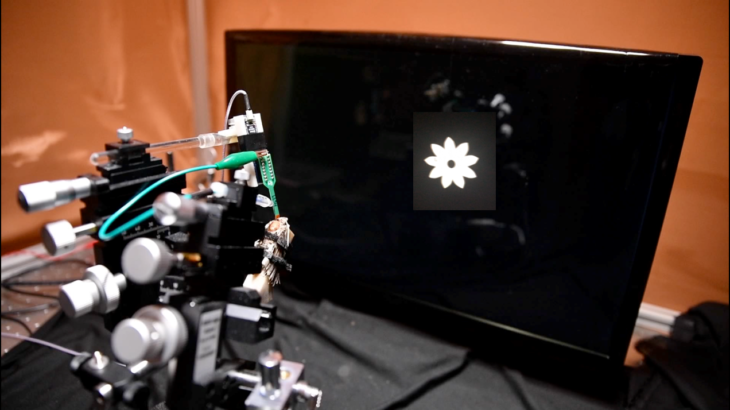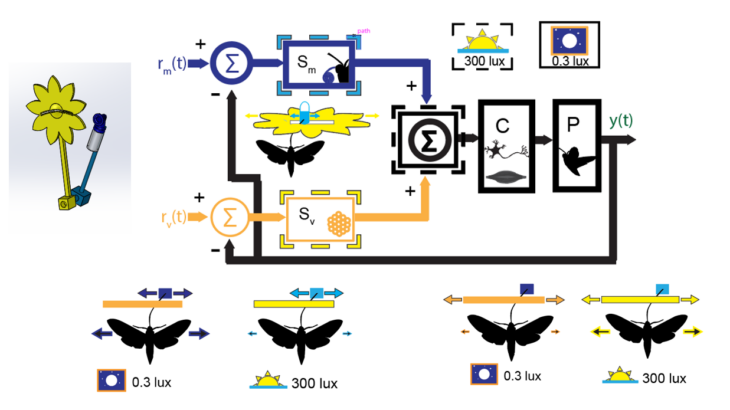
Hawkmoths such as Manduca sexta use proboscis mechanosensation as well as vision to track moving flowers while hover-feeding. In crepuscular moths, this poses a challenge since vision depends heavily on background luminance. If mechanosensory motor-response does not compensate, the same multisensory control can reduce flight performance. Using a two-part robotic flower to provide conflicting sensory […]