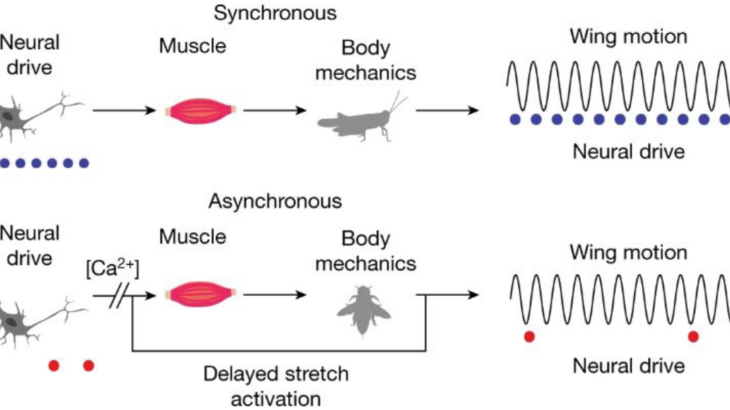
Slow-flapping (also called synchronous) insects use their nervous system to tell the wings how fast to flap. This is how your muscles work as well – muscle contraction is synchronous with a neural signal to the desired muscle. Unfortunately, this mode of actuation does not scale past 100 contractions per second, due to fundamental tradeoffs […]