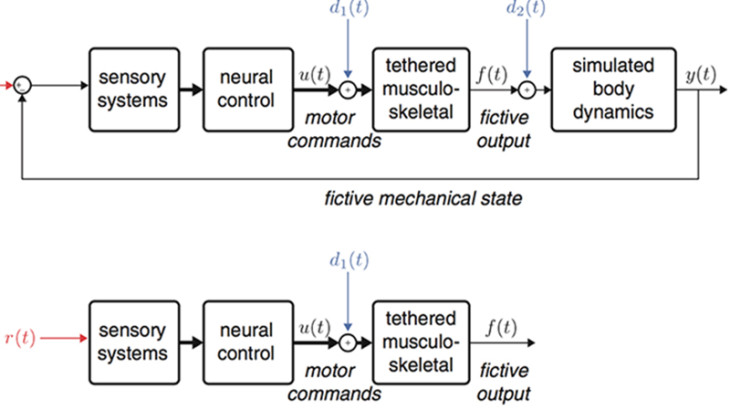
Locomotion is an inherently closed-loop process. What that means is that when we move it changes how we perceive the world -- turning to your left is like the world around you rotating to the right. As a result, what we see (or sense) is the difference between how an object in our world is moving and how we are moving. This is called closed-loop because or movement feeds back and alters our sensory perception (see figure). In addition we usually rely on many parallel and nested feedback loops using our sense of balance, vision, and touch (mechanoreception). When we perform experiments we frequently tether an animal in place or even extract a small part of the nervous system and record its response to sensory stimuli. However in these experiments the closed-loop nature of natural behavior is altered, and the system behaves in open-loop where movement does not alter our perception of the world. This is a feature of neuroscience and biomechanics experiments that many of us have dealt with for a long time.
However, what is less commonly used is the idea that we can explicitly and quantifiably relate the dynamics of the closed loop behaving animal and the open-loop neurophysiology and biomechanics experiments using the tools of control theory and system identification. For example if we know how a moth maneuvers in response to a moving flower during free locomotion, we can predict how the animal should try to turn in a tethered open-loop rig. If we know something about its flight mechanics we can then predict how the nervous system might be operating to enable these behaviors. Even when the predictions fail to predict the new experiment, the differences in predictions frequently tell us about interesting non-linearities in the system. The Sponberg Group has been working with Noah Cowans LIMBS lab and Dr. Eatai Roth at the University of Washington to develop a framework for using multiple experiments with different degrees of closed and open-loop sensing to probe the neural and mechanical mechanisms of locomotion. This involves both the classic closed-loop free behavior experiments and the reduced open-loop physiology experiments, but also includes using virtually reality to artificially close sensory loops in different ways around the animal and thus changes its dynamics.