What is the potential of a particular muscle to control locomotion and how does mechanics affect the control consequences of neural feedback to a muscle?
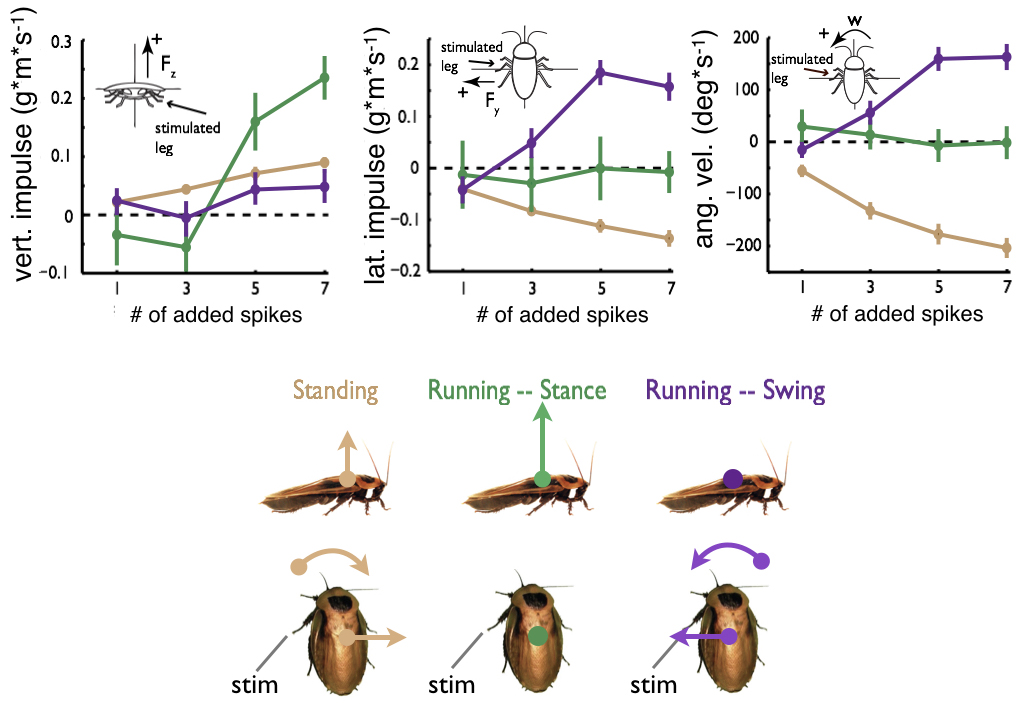
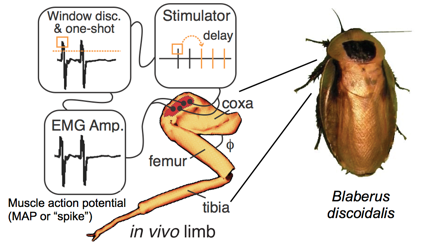
Electrophysiological recordings of nerves and muscles during perturbations do not address how particular motor activation patterns control locomotion since many muscles can change in parallel and each can act in unexpected ways; producing, absorbing or transmitting energy within the body. To experimentally manipulate individual neuromuscular signals while preserving the normal activity in other components, I developed a system to alter the motor activation patterns of intact, behaving cockroaches in real time. I simultaneously measured limb and body dynamics with high-speed videography and a cockroach-mounted, 3D micro-accelerometer backpack. Using this approach I tested how the same neural feedback signal (the addition of 1 to 7 muscle action potentials) can control locomotion in three different mechanical contexts. I discovered that the same increase in spiking encodes three different behavioral responses: 1) linear, precise control of body rotation and translation under static posture conditions, 2) non-linear dynamic control of vertical acceleration during running or 3) rotational control to mediate turning. Using this novel experimental approach of directly modifying signals with known patterns of neural feedback, I discovered that mechanics can filter the effect of neural commands to prove remarkably different control consequences.