How do we assess the centralization of control in moving animals and machines and what are the consequences of changing centralization?
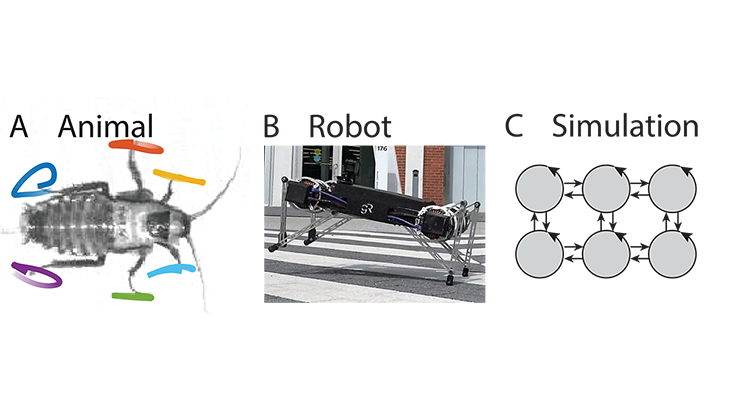
Animals such as cockroaches must coordinate the movements of multiple legs, which are coupled components of a complex hybrid-dynamical system, in order to stably run. Coordination could be achieved through a decentralized control architecture, where a motor command for a particular muscle is only informative of the variation of the local states of the limb, or a centralized architecture, where that motor command is informative of the global states of all the limbs. Centralization has been theorized to be important for stabilizing disruptions to coordination, though decentralized control might be needed to quickly stabilize local perturbations. We measure the centralization of cockroaches running at various speeds to determine if their control architecture adapts. We also use a physical robotic model (the Minitaur robot from Avik De, Ghost Robotics (https://www.ghostrobotics.io/) and Dan Koditschek at U. Penn) and a computational simulation of coupled oscillators to both validate our measure of centralization and to test how changes to centralization might effect locomotor performance. We have established an experimental paradigm where we measure control signals to the limbs as well as these local and global kinematics states of the cockroach. We have developed a metric that quantifies the degree of centralization, which compares the amount of mutual information (MI) between a control signal and different state representations. We next plan to test how the centralization changes as animal and robot encounter different environments.